We will build a simple controller with two drives: hunger and curiosity. At all times, the controller will have a goal location that it is travelling towards.
When the agent is curious, it will choose a goal location it has not visited and move in that direction, recording everything it senses in its memory. When the agent is hungry, it will search its memory for a location containing food and set that as the goal.
First let’s train a drive classifier to guide our search. Then we’ll build up to an AgentModel. For this experiment, we’ll use a Gaussian location model with position mean and standard deviation, as used in SpatialMemory (see Developing Spatial Memory).
from tree_world.simulation import TreeWorld, TreeWorldConfig
from tree_world.models.drives import train_drive_classifier
config = TreeWorldConfig()
# we only want to train on the tree names (e.g. mango, pear, etc.), not the ids (Bob, Alice, etc.)
drive_classifier, drive_keys = train_drive_classifier(config, with_ids=False)
inverse_drive_keys = {v: k for k, v in drive_keys.items()}
Drive Embedding Classifier Loss (with fruit amount): 0.3065146207809448 MSE: 1.6890255210455507e-05 Accuracy: 100.00%
Supporting Classes for Locations and Drives¶
Our agent model needs two properties at all times:
a goal location
a current drive
When the drive changes, a new goal must be selected. Thus we will need functions
choose_hunger_goal()choose_curiosity_goal()
We will also need to know when the agent has reached its goals.
For all of this, we will create helper classes to abstract locations and targets. These classes will help us to track and monitor the goals and progress towards the goal.
import torch
class Location:
def __init__(self, location: torch.Tensor, location_sd: torch.Tensor):
self.location = location
self.location_sd = location_sd
class Target:
arrive_z_threshold: float = 0.1
def __init__(self,
start_location: Location,
target_location: Location
):
self.start_location = start_location
self.current_location = start_location
self.target_location = target_location
self.arrival_count = 0
self.arrival_check_count = 0
def update_current_location(self, location: Location):
self.current_location = location
def has_arrived(self) -> bool:
z = self.current_location.location - self.target_location.location
if self.target_location.location_sd is not None:
sd = self.target_location.location_sd + self.current_location.location_sd
else:
sd = self.current_location.location_sd
z = z / (sd + 1e-6)
result = torch.norm(z) < self.arrive_z_threshold
self.arrival_check_count = self.arrival_check_count + 1
if result:
self.arrival_count = self.arrival_count + 1
return result
def get_heading(self) -> torch.Tensor:
direction = self.target_location.location - self.current_location.location
return direction / torch.norm(direction)
class DriveTarget(Target):
def __init__(self,
drive_embedding: torch.Tensor,
sensory_target: torch.Tensor,
start_location: Location,
target_location: Location,
):
super().__init__(start_location, target_location)
self.drive_embedding = drive_embedding
self.sensory_target = sensory_targetWe’ll also implement a DriveManager to help us choose our goal locations and to assess whether a sensory input is positive (fruit) or negative (poison).
DriveManager.choose_hunger_target() will sample for a target location matching the hunger drive near to the current location. These samples will be checked against the memory, and the “best” sample (highest hunger affinity) will be chosen as the target. If there is no match, it will return None.
from typing import Optional
import torch
from tree_world.models.drives import DriveEmbeddingClassifier
from tree_world.models.memory import SpatialMemory
class DriveManager:
def __init__(self, drive_embedding_model: DriveEmbeddingClassifier, drive_keys: dict, memory: SpatialMemory):
self.drive_embedding_model = drive_embedding_model
self.drive_keys = drive_keys
self.memory = memory
def choose_hunger_target(
self,
location: 'Location',
temperature: float=1.0,
sigma_scale: float=1.0,
num_samples: int=25,
location_temperature: float=100.0,
match_threshold: float=25,
lower_match_threshold: float=5.0,
) -> Optional['DriveTarget']:
hunger_idx = self.drive_keys["edible"]
hunger_value = self.drive_embedding_model.drive_embeddings.weight[hunger_idx]
location_mean, location_sd = self.memory.sample(
location.location[None, :],
location.location_sd[None, :],
hunger_value[None, :],
return_distribution=True,
temperature=temperature,
num_samples=num_samples,
sigma_scale=sigma_scale,
location_temperature=location_temperature,
match_threshold=None, # <-- the location_temperature will eliminate faraway locations
lower_match_threshold=lower_match_threshold,
)
sensory_expectation = self.memory.read(location_mean, location_sd, match_threshold=match_threshold) # (batch_size, num_samples, sensory_dim)
hunger_score = torch.bmm(sensory_expectation, hunger_value[None, :, None]).squeeze(-1) # (batch_size, num_samples)
hunger_values, indices = torch.max(hunger_score, dim=-1)
if hunger_values[0] > 0.0:
location_indices = indices.unsqueeze(-1).repeat(1, 1, location_mean.shape[-1])
location_mean = location_mean.gather(dim=-2, index=location_indices).squeeze(-2) # (batch_size, sensory_dim)
location_sd = location_sd.gather(dim=-2, index=location_indices).squeeze(-2) # (batch_size, sensory_dim)
sensory_indices = indices.unsqueeze(-1).repeat(1, 1, sensory_expectation.shape[-1])
sensory_target = sensory_expectation.gather(dim=-2, index=sensory_indices).squeeze(-2) # (batch_size, sensory_dim)
target_location = Location(location_mean.squeeze(0), location_sd.squeeze(0))
drive_target = DriveTarget(
hunger_value,
sensory_target,
location,
target_location,
)
return drive_target
else:
return None
def choose_curiosity_target(self, location: 'Location', space_scale: float) -> Optional['DriveTarget']:
# for now, choose a random location uniformly
target_location_mean = torch.empty_like(location.location).uniform_(-space_scale, space_scale)
target_location_sd = torch.ones_like(location.location_sd)
target_location = Location(target_location_mean.squeeze(0), target_location_sd.squeeze(0))
target = Target(location, target_location)
return target
def assess_valence(self, sensory: torch.Tensor) -> float:
squeeze = False
if sensory.ndim < 2:
sensory = sensory[None, :]
squeeze = True
drive_targets = self.drive_embedding_model(sensory.detach())
output = (
drive_targets[:, self.drive_keys["edible"]] -
drive_targets[:, self.drive_keys["poison"]]
)
if squeeze:
return output[0].item()
else:
return outputLet’s check that our drive manager works ok. We’ll create a world, a sensor, and a memory and show some hunger targets and location targets.
from tree_world.simulation import TreeWorldConfig, TreeWorld, SimpleSensor
R = 50
D = 1024
S = 2 * R + 1
real_magnitude = 500.0
config = TreeWorldConfig()
config.embedding_dim = D
config.max_memory_size = S**2
sensor = SimpleSensor.from_config(config)
world = TreeWorld.random_from_config(config)from tree_world.visualize import make_sensory_grid
grid_locations, sensor_values = make_sensory_grid(S, real_magnitude, world, sensor)from tree_world.visualize import RGBProjector
rgb_model = RGBProjector.make_rgb_model_from_sensor_values(sensor_values)from tree_world.models.memory import SpatialMemory
memory = SpatialMemory.from_config(config)
drive_manager = DriveManager(drive_classifier, drive_keys, memory)
memory.write(grid_locations[None, ...], torch.full_like(grid_locations[None, ...], 5.0), sensor_values[None, ...])
memory_values = memory.read(grid_locations[None, ...], torch.full_like(grid_locations[None, ...], 5.0)).squeeze(0)
print(f"memory.memory_locations: {memory.memory_locations.shape} memory.memory_senses: {memory.memory_senses.shape}")
base_sensor_field, fig, ax = rgb_model.plot_sensor_field(world, memory_values)
agent_location = torch.tensor([-250.0, -100.0])
agent_location_sd = torch.ones(2) * 5.0
hunger_target = drive_manager.choose_hunger_target(
Location(agent_location, agent_location_sd),
temperature=0.01,
sigma_scale=1.0,
num_samples=25,
match_threshold=25,
lower_match_threshold=5.0,
location_temperature=10_000,
)
assert hunger_target is not None
print(f"hunger_target: {hunger_target.__class__.__name__}({hunger_target.target_location.location.squeeze(0).detach().cpu().numpy().tolist()}, {hunger_target.target_location.location_sd.squeeze(0).detach().cpu().numpy().tolist()})")
hunger_mean = hunger_target.target_location.location.squeeze(0)
ax.scatter(hunger_mean[0], hunger_mean[1], marker="s", color="black", s=100)
ax.scatter(agent_location[0], agent_location[1], marker="^", color="black", s=100)
curiosity_target = drive_manager.choose_curiosity_target(
Location(agent_location, agent_location_sd),
space_scale=500.0,
)
curiosity_mean = curiosity_target.target_location.location.squeeze(0)
ax.scatter(curiosity_mean[0], curiosity_mean[1], marker=".", color="black", s=100)
memory.memory_locations: torch.Size([1, 10201, 2]) memory.memory_senses: torch.Size([1, 10201, 1024])
hunger_target: DriveTarget([-190.0, -220.0], [5.0, 5.0])
/Users/alockett/dev/tree-world/src/tree_world/visualize.py:269: UserWarning: You passed a edgecolor/edgecolors ('k') for an unfilled marker ('x'). Matplotlib is ignoring the edgecolor in favor of the facecolor. This behavior may change in the future.
ax.scatter(
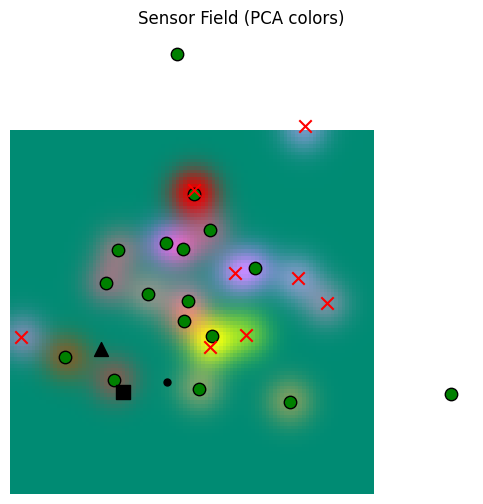
So we can get decent samples of where to go for hunger from our fully populated memory, although we have to carefully set the temperature (0.01) and location weight (0.0001 -- balancing the location importance to sampling).
Building the Agent Model: First Approach¶
The first version of our agent will do the following steps in order:
Update the current drive
Choose a new target if the drive changed OR if the target was reached
Compute an action to move towards the target.
from tree_world.simulation import AgentModel
class DriveBasedAgentWithMemory(AgentModel):
action_scale: float = 1.0
space_scale: float = 500.0
hunger_threshold: float = 0.5
def __init__(self,
sensory_embedding_dim: int,
sensory_embedding_model: str,
dim: int=2,
can_see_fruit_distance: float=10.0,
max_distance: float=100.0,
memory: SpatialMemory=None,
drive_manager: DriveManager=None,
):
super().__init__(sensory_embedding_dim, sensory_embedding_model, dim, can_see_fruit_distance, max_distance)
assert memory is not None
assert drive_manager is not None
self.memory = memory
self.drive_manager = drive_manager
self.is_hungry = False
self.target = None
def reset(self):
super().reset()
self.memory.reset()
self.is_hungry = False
self.target = None
def select_target(self, agent_location: Location):
target = None
if self.is_hungry:
if self.target is not None and isinstance(self.target, DriveTarget):
target = self.target
else:
target = self.drive_manager.choose_hunger_target(
agent_location,
temperature=0.01,
sigma_scale=1.0,
num_samples=25,
location_temperature=10_000,
match_threshold=None,
lower_match_threshold=5.0,
)
if target is None:
target = self.drive_manager.choose_curiosity_target(agent_location, self.space_scale)
return target
def adjust_heading(self, heading: torch.Tensor, agent_location: Location):
return heading
def get_action(self, distance: float, embedding: torch.Tensor, heading: torch.Tensor, health: float,
agent_location: torch.Tensor=None, obj_location: torch.Tensor=None):
assert agent_location is not None, "DriveBasedAgent requires perfect localization"
agent_location = Location(agent_location, torch.ones_like(agent_location) * 5.0)
was_hungry = self.is_hungry
self.is_hungry = health <= self.hunger_threshold
drive_changed = self.is_hungry != was_hungry
if self.target is not None:
self.target.update_current_location(agent_location)
if self.target.has_arrived():
# print(f"Agent reached target: ({self.target.target_location.location[0]:.2f}, {self.target.target_location.location[1]:.2f}) -- ", end="")
# print(f"Agent location: ({agent_location.location[0]:.2f}, {agent_location.location[1]:.2f})")
self.target = None
if drive_changed or self.target is None:
self.target = self.select_target(agent_location)
# print(f"Agent set target (hunger:{self.is_hungry}): {self.target.__class__.__name__}({self.target.target_location.location[0].item():.2f}, {self.target.target_location.location[1].item():.2f})")
assert self.target is not None, "No target found"
position_delta = self.target.get_heading() * self.action_scale
position_delta = self.adjust_heading(position_delta, agent_location)
self.memory.write(agent_location.location[None, :], agent_location.location_sd[None, :], embedding[None, :])
return position_delta, position_delta.clone()
@classmethod
def from_config(cls, config: TreeWorldConfig):
memory = SpatialMemory.from_config(config)
drive_classifier, drive_keys = train_drive_classifier(config, with_ids=False)
drive_manager = DriveManager(drive_classifier, drive_keys, memory)
return cls(
config.sensory_embedding_dim,
config.sensory_embedding_model,
config.dim,
config.can_see_fruit_distance,
config.max_sense_distance,
memory=memory,
drive_manager=drive_manager,
)
Now we can simulate the world to see how this agent does.
config.model_type = "DriveBasedAgentWithMemory"
world = TreeWorld.random_from_config(config)Drive Embedding Classifier Loss (with fruit amount): 0.30512189865112305 MSE: 6.320036845863797e-06 Accuracy: 100.00%
steps = 1000
print(f"Running tree world for {steps} steps...")
world.run(steps, record=True)
print()
print("Tree world run complete.")
print(f"Agent health: {world.agent.health}")
print(f"Agent fruit eaten: {world.agent.fruit_eaten}")
print(f"Agent poisonous fruit eaten: {world.agent.poisonous_fruit_eaten}")
print(f"Agent total movement: {world.agent.total_movement}")
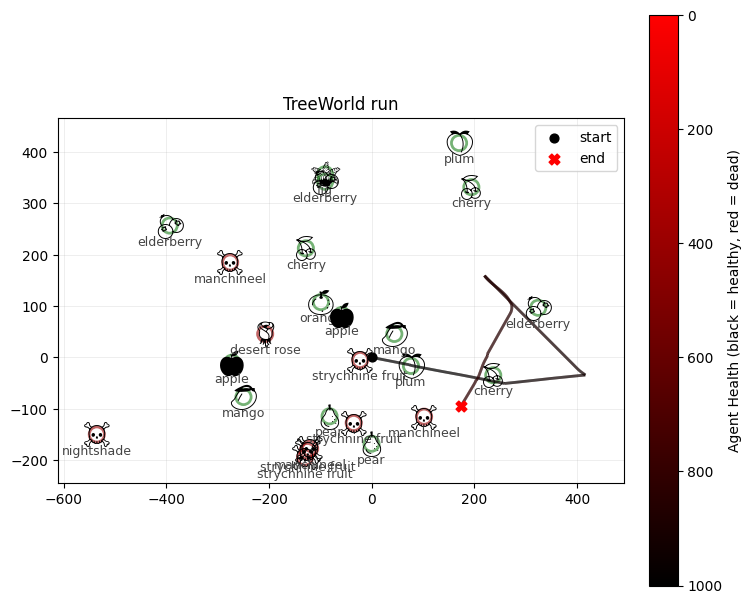
print(f"Agent final location: {torch.norm(world.agent.location).item()}")Running tree world for 1000 steps...
Tree world run complete.
Agent health: 799.98779296875
Agent fruit eaten: 0
Agent poisonous fruit eaten: 0
Agent total movement: 1000.0
Agent final location: 567.3095092773438
from tree_world.visualize import visualize_treeworld_run
visualize_treeworld_run(
world.tree_locations.numpy().tolist(),
[tree.name for tree in world.trees],
[tree.is_poisonous for tree in world.trees],
world.record_positions,
world.record_healths,
world.config.max_health,
title="TreeWorld run",
save_path="tree_world_run.png",
show=False,
)/Users/alockett/dev/tree-world/src/tree_world/visualize.py:226: UserWarning: Glyph 108 (l) missing from font(s) Noto Emoji.
fig.savefig(save_path, bbox_inches="tight", dpi=150)
/Users/alockett/dev/tree-world/src/tree_world/visualize.py:226: UserWarning: Glyph 112 (p) missing from font(s) Noto Emoji.
fig.savefig(save_path, bbox_inches="tight", dpi=150)
(<Figure size 800x800 with 2 Axes>, <Axes: title={'center': 'TreeWorld run'}>)/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/events.py:82: UserWarning: Glyph 108 (l) missing from font(s) Noto Emoji.
func(*args, **kwargs)
/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/events.py:82: UserWarning: Glyph 112 (p) missing from font(s) Noto Emoji.
func(*args, **kwargs)
/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 108 (l) missing from font(s) Noto Emoji.
fig.canvas.print_figure(bytes_io, **kw)
/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 112 (p) missing from font(s) Noto Emoji.
fig.canvas.print_figure(bytes_io, **kw)
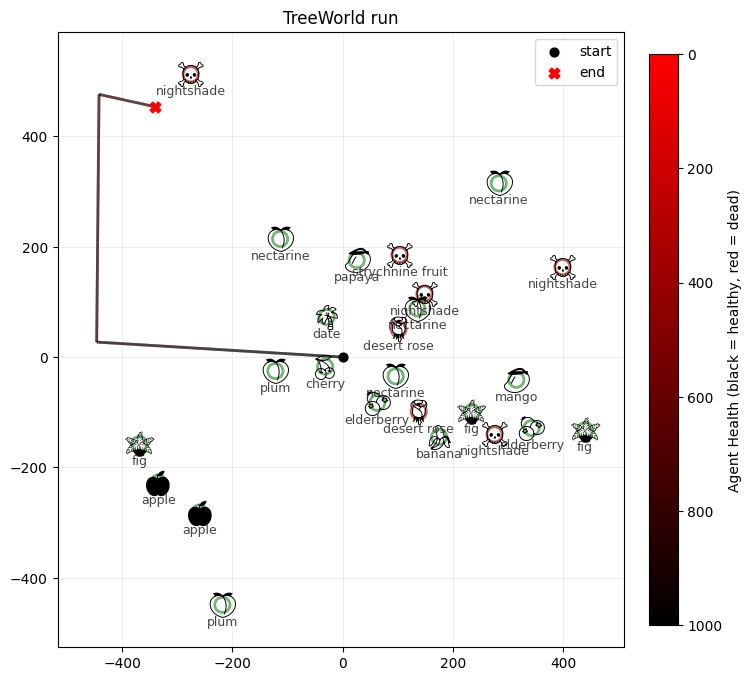
So our agent explores, but then when it gets hungry returns to a point near fruit. But it is unable to exploit the fruit, either because its sensors aren’t good enough to determine where the trees are, or because it can’t set a target exactly on a fruit tree.
Also, our agent has no impetus to avoid poison trees either, so sometimes it just eats poison.
Let’s try to fix these issues by adding a local map of the environment.
Adding a Local Approach / Avoid Map¶
The memory can tell the agent about its surroundings. In addition to the target, which is determined by overall drives, we can shape the agent’s path to exploit the area around it as it goes, and to avoid problem locations.
First, let’s make a function to build a map from the local environment and assess it for approach / avoid valence.
def build_local_map(
memory: SpatialMemory,
location: Location,
num_grid_points: int=10,
grid_size: float=10.0,
match_threshold: float=25.0,
):
grid_extent = grid_size * num_grid_points
grid_points = torch.linspace(-grid_extent, grid_extent, num_grid_points)
grid_locations = (
location.location.view(1, 1, 2)
+ torch.cartesian_prod(grid_points, grid_points).view(1, -1, 2)
)
grid_locations_sd = torch.ones_like(grid_locations) * grid_size / 2
memory_values = memory.read(grid_locations, grid_locations_sd, match_threshold=match_threshold).squeeze(0)
grid_valence = drive_manager.assess_valence(memory_values)
return grid_locations, grid_valencegrid_extent = 100.0
locs, valence = build_local_map(memory, Location(torch.tensor([-250.0, -100.0]), torch.ones(2) * 5.0), num_grid_points=10, grid_size=10.0)
print("valence max: ", valence.max())
print("valence min: ", valence.min())
from matplotlib import pyplot as plt
plt.imshow(
valence.view(10, 10).detach().cpu().numpy(),
origin="lower",
extent=[-grid_extent, grid_extent, -grid_extent, grid_extent],
)
valence max: tensor(0.9985, grad_fn=<MaxBackward1>)
valence min: tensor(0.0015, grad_fn=<MinBackward1>)
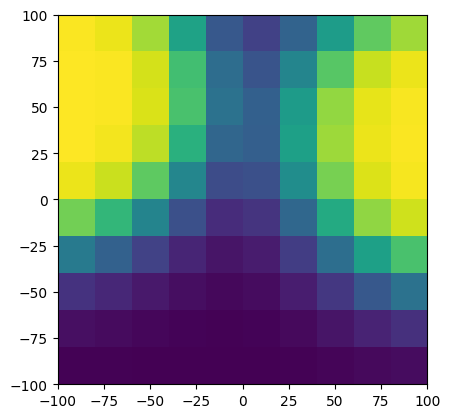
This map is good, but we want our agent to only move forward, not backward, so rather than making a full local map, let’s make a map of what is in front of the agent. We’ll imagine our agent at the origin pointing in the anticipated direction of travel. Then, we’ll make a grid that points out at angle on either side.
To do this, we’ll make a grid of points . We’ll associate with the forward direction of motion, and then we will express each as a linear combination the unit vector (forward) and its orthonormal vector (left). This is
which is of course a rotation. This yields a grid of forward coordinates in the basis consisting of the direction of movement and its orthonormal complement with the agent at the origin. We can then finalize the coordinates for the local map in the real system by rotating to the real frame from the agent’s self frame and translating from the agent’s position to the absolute origin.
We can then add this grid to the
import math
def build_forward_local_map(
memory: SpatialMemory,
location: Location,
heading: torch.Tensor,
num_grid_points: int=10,
grid_size: float=10.0,
match_threshold: float=25.0,
):
axis_points = torch.arange(num_grid_points, dtype=heading.dtype, device=heading.device)
axis_grid = torch.cartesian_prod(axis_points, axis_points)
# we want to get the vector to the diagonal of the grid, which is y=x
rotation_matrix = math.sqrt(0.5) * torch.tensor([
[1, 1],
[-1, 1],
], dtype=heading.dtype, device=heading.device)
grid_points_relative = (axis_grid @ rotation_matrix.T) * grid_size
heading_normalized = heading / torch.norm(heading)
heading_orthogonal = torch.tensor([-heading_normalized[1].item(), heading_normalized[0].item()],
dtype=heading.dtype, device=heading.device)[None, :]
grid_points_absolute = location.location[None, None, :] + (
grid_points_relative[..., 0, None] * heading_normalized + grid_points_relative[..., 1, None] * heading_orthogonal
)[None, ...]
grid_locations_sd = torch.ones_like(grid_points_absolute) * grid_size / 2
memory_values = memory.read(grid_points_absolute, grid_locations_sd, match_threshold=match_threshold).squeeze(0)
grid_valence = drive_manager.assess_valence(memory_values)
deviations = grid_points_relative[..., 1]
return grid_points_absolute, grid_valence, deviations, heading_orthogonal
grid_extent = 100.0
agent_location_mean = torch.tensor([-250.0, -100.0])
agent_location_sd = torch.ones(2) * 5.0
agent_location = Location(agent_location_mean, agent_location_sd)
agent_heading = torch.tensor([-1.0, -1.0])
locs, valence, _, _ = build_forward_local_map(
memory, agent_location, agent_heading, num_grid_points=10, grid_size=10.0
)
print("valence max: ", valence.max())
print("valence min: ", valence.min())
from matplotlib import pyplot as plt
plt.imshow(
valence.view(10, 10).detach().cpu().numpy(),
origin="lower",
extent=[-grid_extent, grid_extent, -grid_extent, grid_extent],
)
valence max: tensor(0.8871, grad_fn=<MaxBackward1>)
valence min: tensor(0.0030, grad_fn=<MinBackward1>)
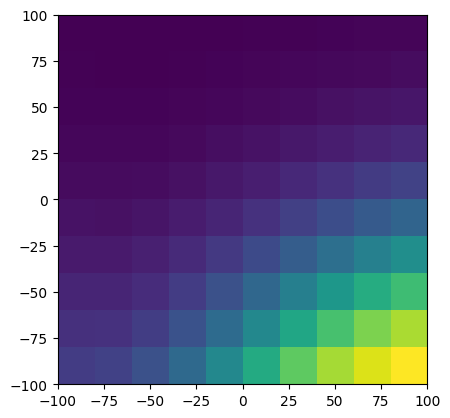
Local Force Control for Approach / Avoid Valence¶
The value deviation returned by this new method is a vector pointing orthogonally from the central forward line towards the position read from the map. This represents a “push” from the current heading that will cause it to deviate towards the point in question.
The valence tell us whether to push away or towards. In the case of a negative valence, we want to push harder if the negative stimulus is closer, and for a positive valence we push harder if it is further away.
From this, we can take the desired heading and deviate based on this local valence to avoid poison and approach edible fruit.
def apply_deviation(
location: Location, heading: torch.Tensor, memory: SpatialMemory,
deviation_strength: float=1.0,
num_grid_points: int=10, grid_size: float=10.0, match_threshold: float=25.0
):
locs, valence, deviations, heading_orthogonal = build_forward_local_map(
memory, location, heading, num_grid_points, grid_size, match_threshold
)
grid_extent = grid_size * num_grid_points
max_deviation_norm = grid_extent * math.sqrt(0.5)
# deviation is the scalar magnitude and direction of the deviation vector
# positive or negative depending on whether the point is to the left or right of the heading
# for negative valence, we want to push away HARDER if the point is closer to our line of travel
# whereas for positive valence, we want to push towards HARDER if the point is further away from our line of travel
# we also want to choose the sign of the response based on the valence sign, so that we push away from poison and towards edible fruit
negative_deviations = -(max_deviation_norm - deviations.abs()) * torch.sign(deviations)
delta_delta = deviation_strength * torch.where(valence < 0.0, negative_deviations, deviations) * valence.abs()
raw_heading = heading + delta_delta.mean() * heading_orthogonal
heading_norm = torch.norm(heading)
return heading_norm * raw_heading / torch.norm(raw_heading)
altered_heading = apply_deviation(
agent_location, agent_heading, memory, num_grid_points=10, grid_size=10.0, match_threshold=25.0
)
print("original heading: ", agent_heading)
print("altered heading: ", altered_heading)
original heading: tensor([-1., -1.])
altered heading: tensor([[ 0.7033, -1.2269]], grad_fn=<DivBackward0>)
Now we can make a new agent model that use this local map to direct itself.
class DriveBasedAgentWithMemoryAndLocalMap(DriveBasedAgentWithMemory):
deviation_strength: float = 5.0
def adjust_heading(self, heading: torch.Tensor, agent_location: Location):
return apply_deviation(
agent_location, heading, self.memory, deviation_strength=self.deviation_strength,
num_grid_points=5, grid_size=5.0, match_threshold=25.0
).detach().squeeze()
config.model_type = "DriveBasedAgentWithMemoryAndLocalMap"world = TreeWorld.random_from_config(config)
steps = 1000
print(f"Running tree world for {steps} steps...")
world.run(steps, record=True)
print()
print("Tree world run complete.")
print(f"Agent health: {world.agent.health}")
print(f"Agent fruit eaten: {world.agent.fruit_eaten}")
print(f"Agent poisonous fruit eaten: {world.agent.poisonous_fruit_eaten}")
print(f"Agent total movement: {world.agent.total_movement}")
print(f"Agent final location: {torch.norm(world.agent.location).item()}")Drive Embedding Classifier Loss (with fruit amount): 0.306037038564682 MSE: 1.2816405615012627e-05 Accuracy: 100.00%
Running tree world for 1000 steps...
Tree world run complete.
Agent health: 817.5888671875
Agent fruit eaten: 20
Agent poisonous fruit eaten: 0
Agent total movement: 1000.0
Agent final location: 197.92108154296875
from tree_world.visualize import visualize_treeworld_run
visualize_treeworld_run(
world.tree_locations.numpy().tolist(),
[tree.name for tree in world.trees],
[tree.is_poisonous for tree in world.trees],
world.record_positions,
world.record_healths,
world.config.max_health,
title="TreeWorld run",
save_path="tree_world_run.png",
show=False,
)/Users/alockett/dev/tree-world/src/tree_world/visualize.py:226: UserWarning: Glyph 108 (l) missing from font(s) Noto Emoji.
fig.savefig(save_path, bbox_inches="tight", dpi=150)
/Users/alockett/dev/tree-world/src/tree_world/visualize.py:226: UserWarning: Glyph 112 (p) missing from font(s) Noto Emoji.
fig.savefig(save_path, bbox_inches="tight", dpi=150)
(<Figure size 800x800 with 2 Axes>, <Axes: title={'center': 'TreeWorld run'}>)/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/events.py:82: UserWarning: Glyph 108 (l) missing from font(s) Noto Emoji.
func(*args, **kwargs)
/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/events.py:82: UserWarning: Glyph 112 (p) missing from font(s) Noto Emoji.
func(*args, **kwargs)
/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 108 (l) missing from font(s) Noto Emoji.
fig.canvas.print_figure(bytes_io, **kw)
/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 112 (p) missing from font(s) Noto Emoji.
fig.canvas.print_figure(bytes_io, **kw)
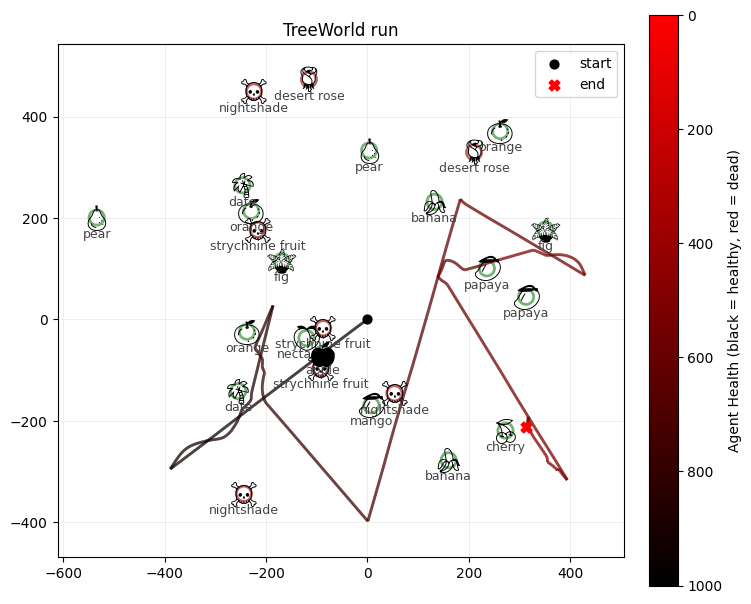
This time, the agent often manages to survive for all 1000 steps.
Let’s run it a bit longer.
world = TreeWorld.random_from_config(config)
steps = 50000
print(f"Running tree world for {steps} steps...")
world.run(steps, record=True)
print()
print("Tree world run complete.")
print(f"Agent health: {world.agent.health}")
print(f"Agent fruit eaten: {world.agent.fruit_eaten}")
print(f"Agent poisonous fruit eaten: {world.agent.poisonous_fruit_eaten}")
print(f"Agent total movement: {world.agent.total_movement}")
print(f"Agent final location: {torch.norm(world.agent.location).item()}")Drive Embedding Classifier Loss (with fruit amount): 0.30593597888946533 MSE: 1.1985432138317265e-05 Accuracy: 100.00%
Running tree world for 50000 steps...
Tree world run complete.
Agent health: -0.050269946455955505
Agent fruit eaten: 25
Agent poisonous fruit eaten: 0
Agent total movement: 5746.0
Agent final location: 377.7901306152344
from tree_world.visualize import visualize_treeworld_run
visualize_treeworld_run(
world.tree_locations.numpy().tolist(),
[tree.name for tree in world.trees],
[tree.is_poisonous for tree in world.trees],
world.record_positions,
world.record_healths,
world.config.max_health,
title="TreeWorld run",
save_path="tree_world_run.png",
show=False,
)/Users/alockett/dev/tree-world/src/tree_world/visualize.py:226: UserWarning: Glyph 108 (l) missing from font(s) Noto Emoji.
fig.savefig(save_path, bbox_inches="tight", dpi=150)
/Users/alockett/dev/tree-world/src/tree_world/visualize.py:226: UserWarning: Glyph 112 (p) missing from font(s) Noto Emoji.
fig.savefig(save_path, bbox_inches="tight", dpi=150)
(<Figure size 800x800 with 2 Axes>, <Axes: title={'center': 'TreeWorld run'}>)/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/events.py:82: UserWarning: Glyph 108 (l) missing from font(s) Noto Emoji.
func(*args, **kwargs)
/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/events.py:82: UserWarning: Glyph 112 (p) missing from font(s) Noto Emoji.
func(*args, **kwargs)
/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 108 (l) missing from font(s) Noto Emoji.
fig.canvas.print_figure(bytes_io, **kw)
/Users/alockett/dev/tree-world/venv/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 112 (p) missing from font(s) Noto Emoji.
fig.canvas.print_figure(bytes_io, **kw)
Conclusion¶
We built a deterministic drive-based agent based on a memory map and a local approach/avoid controller.
The agent now does a decent job of exploring the space and surviving, but it still has some problems:
It cannot “see” poisonous fruit fast enough, and sometimes stumbles onto poison before it can determine it is there to avoid it
The local map is ambiguous in some cases; if there is a cluster of fruit trees, the deviation force may take the controller between two fruit trees, causing it to get no fruit
In the force control, poison and edible fruit can cancel each other out, meaning that opportunities to exploit are lost.
The deficiencies, in part, are due to the way the “smell” sensor averages stimuli; it can be difficult to tease apart the meaning. We now have two options to improve:
Make the sensor better, so that the agent can better tell what to avoid and what to approach exactly
Make the deviation controller better, by training a network to decide when and where to deviate
We’ll start by making a better neural controller, to see how far we can get before we have to improve the sensors.